ECU MODES OF OPERATION
Emission Compliant (Catalysts) Mode
All production cars post August 1992 (UK) have to run in this way with a catalyst fitted in the exhaust system. Here the air fuel ratio is clamped at 14.7:1 under normal running conditions (up to 3400 rpm or 3/4 throttle) as this is the point chosen for the Rover V8 engine, to be near to the ideal 14.7:1 air fuel ratio that is considered the best point for a complete fuel burn and minimum exhaust pollutants (referred to as lambda 1). Due to the old design of the engine it wont run nicely that lean, so this compromise was reached. Due to the way the emission regulations where written in the 1990's the catalysts fuel mapping and lambda feedback is disregarded above 3400 rpm or 3/4 throttle to allow the engine to give best performance, at a point when emissions are not measured.
Non Catalysts Mode
It can also be run without catalysts and no pollution restraints allowing for a much wider range of air fuel ratios between 12.5:1 and 15.5:1 depending on the engines requirements. On the whole standard engines run better in non catalyst mode as the base mapping is set to suit the engine design, and this mapping was used on UK vehicles pre 1992 and the catalyst laws. The two modes of use are referred to open loop (no lambda feedback) for non catalyst use, and closed loop (with lambda feedback) for catalyst use.
There are both pros and cons for running in ether modes:
Non Catalyst Open Loop
Non catalyst mode allows the engines ideal air/fuel ratios to be maintained to suit the best running of the engine in all conditions. This allows the engine to run leaner under light cruising leading to better economy, and slightly richer at a low RPM which suits the Rover V8 engine. There is also a limited mixture adjustment that can be altered from a setting on the side of the A.F.M under and the low speed fuelling can be tweaked for a smooth idle and smooth running up to around 2500 rpm. This mode is of most use where a high performance cam is used, as the A.F.M measurement does not cope well with the poor/pulsed air flow produces at low RPM by a performance cam, so fuelling can be inaccurate, and this effect can be reduced by altering the mixture to an extent. A big downside to running a non catalyst set up, is the ECU relies totally on the fixed fuel map parameters in the ECU, so any engine modifications can make this data incorrect, so the ECU may need to be re-chipped to suit. It also wont pass the emissions tests at MOT time, as the wide variances in air fuel ratio, and resulting shifts in exhaust pollutants are over too wide a range for the catalyst to correct.
Catalysts Mode, Closed Loop
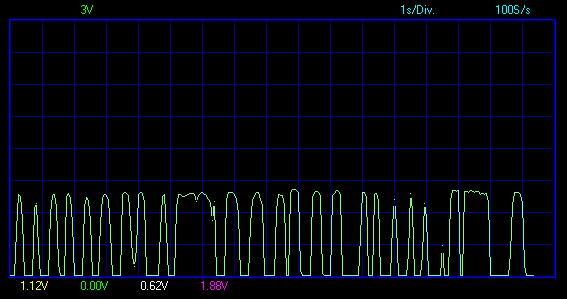
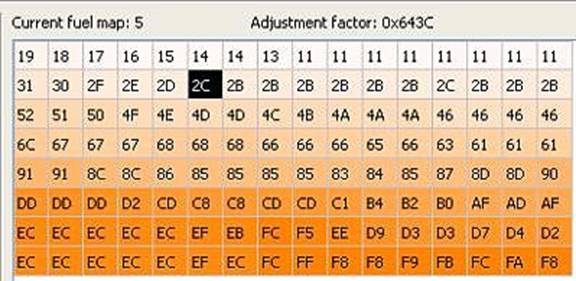
In catalysts mode the ECU can compensate for an incorrect mixture outside the desired 14.7:1 air fuel ratio, by altering the mixture by up to + /- 20% on the fly depending on the readings from the Lambda sensors. The ECU will automatically trim the mixture once it gets a signal from the Lambda probes showing an over rich or over lean condition and will simply apply a series of steps (up to 1024) to correct the mixture until there is a shift in lambda output showing the mixture has now crossed the 14.35 A/F ratio point. The cycle is then reversed to swing the mixture the other way, and the process repeated, and can be observed by a rough 1 volt square wave signal from the probes as the mixture cycles. The majority of fuel trimming takes place each time the car idles, and all the sensor inputs are stable, and once this is set only small adjustments should need to be made from this point onwards. It will then constantly correct the mixture under various load conditions with small corrections, but if large corrections are made it can be picked up as poor throttle or snatchy response. If large corrections are needed there is either a problem with the basic fuel map being incorrect, such as when the engine has been significantly modified and is still running a stock fuel map, or there is a new hardware fault. This lambda feed back will allow the system to compensate for engine modifications to a reasonable extent, whilst maintaining low emissions but the down side of this can be poor low speed performance where the engine develops a shunting type behaviour with a performance cam as the ECU battles to keep the emissions low. This is part due to the poor pulsed breathing of performance cams at low R.P.M when an A.F.M is used to measure the airflow, combined with the lambda cycle. You can get a similar condition at higher speeds if the engine has been significantly modified as the ECU runs out of correction range, so the base fuel map will need changing to reduce the amount of correction needed. Another downside of the catalysts mode it clamps the mixture slightly richer than it needs be under light load to keep the un burnt hydro carbon pollutants to a minimum, so the economy suffers slightly. The ECU only tries to maintain the emissions up to 3400 rpm, or about 3/4 throttle, and beyond these points it simply fuels the engine dependent on the fuel map data, so the performance is the same as a non catalysts open loop setup.
Many people are now replacing the 14CUX with a more modern ECU, that can accurately supply the engine with the required mixture, by using wide band lambda sensors and hopefully still comply with the emissions requirements, although this may prove difficult in some cases where these ECUs are programmed for maximum power over emissions. In a way this is going back to the non catalyst fuelling mode, but the 14CUX does not have the advantages of wide band Lambda sensors to trim the mixture if its wrong. It also cant control the ignition spark, unlike some of the more comprehensive after market ECU's as one of the poorest parts of the Rover V8 set up is the ignition timing and general spark control.
This chart shows the generic catalysts closed loop point, as on the RV8 the closed loop point is set fractionally richer to allow for the old design of the cylinder heads.
Switching ECU Modes
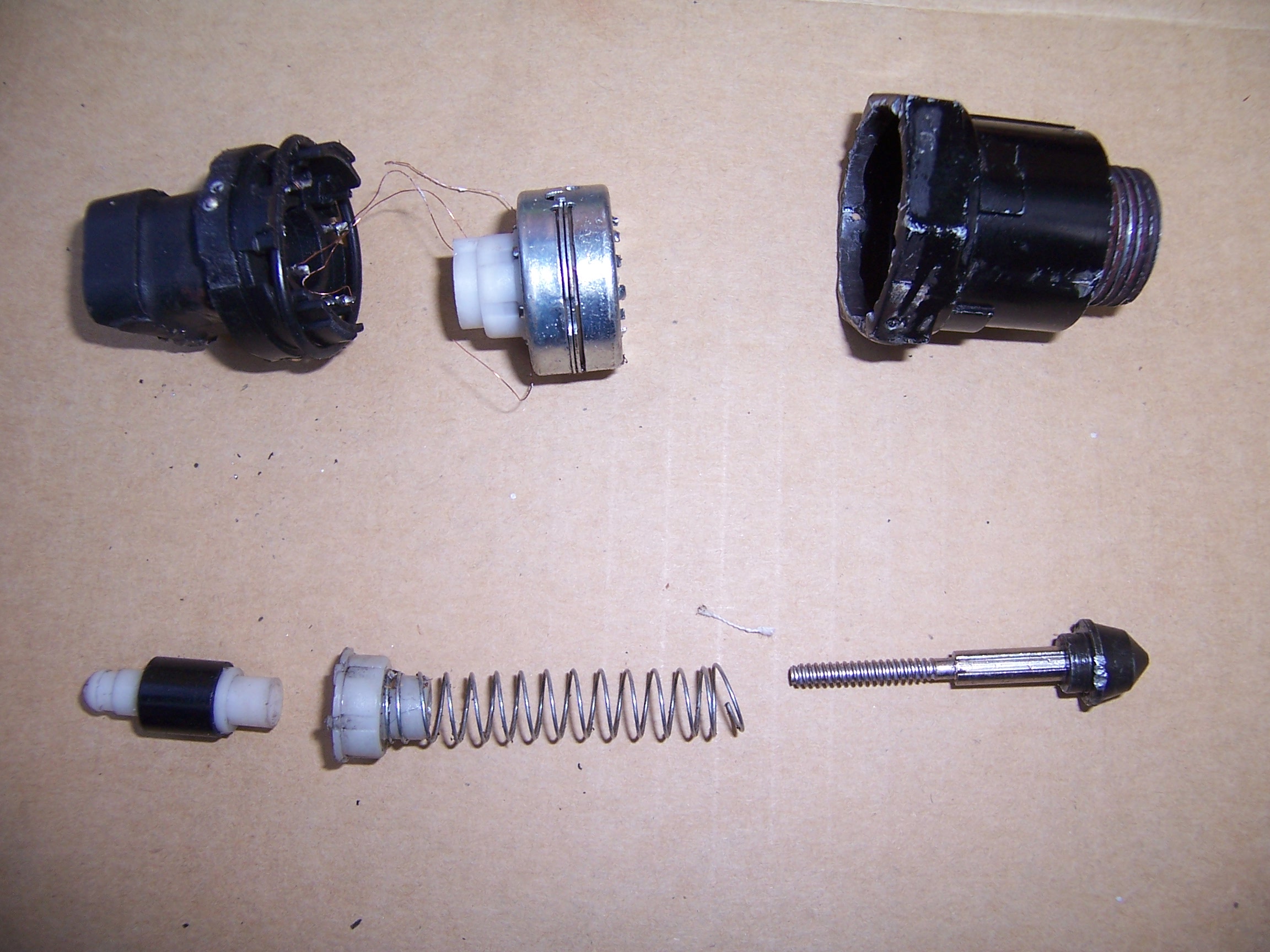
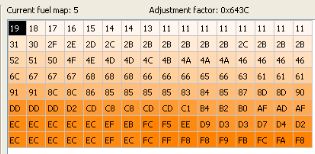
This is easily done by changing the “tune” resistor that is found poking out of the wiring loom near the ECU. Changing the value of this tune resistor will change the fuel map used, with a total of 5 maps being available. The original Lucas resistors have a coloured sleeve on the resistor wires, and frequently the map used will be referred to by the colour of this sleeve, as say the green tune which in this case is a non catalysts UK map. Some later wiring looms don't have a tune resistor fitted at all, as by default the ECU will run in full catalysts mode without it.
White 3900 Ohms USA and European vehicles with catalytic converters
Green 470 Ohms UK and European vehicles without catalytic converters
Yellow 910 Ohms Saudi vehicles (without catalytic converters)
Red 180 Ohms Australia and the rest of the world
It is perfectly possible to easily switch maps by using a switch to change resistor values or using a variable resistor, but it needs to be done with the ignition off, and it tends to generate a fault code on the ECU showing tune resistor out of range. This will throw the ECU into limp home mode, and will require the ECU to be unplugged from the wiring loom briefly to clear the fault code. It’s not advisable to run a non catalyst fuel map if the physical catalysts are fitted in the exhaust, as the less controlled fuelling may lead to the catalysts overheating and melting that can lead to dangerously high temperatures, followed by exhaust blockage as the catalyst breaks up. It is perfectly acceptable to run either catalyst or non catalyst mode on a car without catalysts however.
WARNING: If you have a modified chip (ie non Range Rover standard), and you want to switch maps the alternate map may not be suitable for your engine specification, as you may switch from a modified fuel map to a non modified fuel map that is totally unsuitable. If in doubt check with the chip supplier!
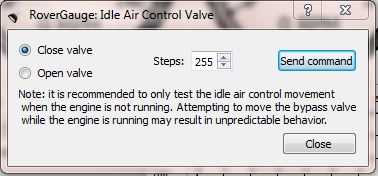
ECU Initial Start-up Sequence
The sequence to restart the engine actually starts as you turn off the ignition switch. As the ignition voltage is removed from the ECU, the unit sends out a signal to the stepper motor attached to the plenum chamber to wind it fully backwards and allow maximum air into the plenum chamber. This can be heard as a buzz from the stepper motor as the engine dies. As the ignition voltage has now gone, the engine simply stops with the stepper motor in maximum air position.
On turning the ignition back on, a short pulse (about 1- 3 seconds) is sent to the fuel pump to pressurise the fuel rail. Once the starter motor starts to turn the engine, a 12v pulse is fed back to the ECU from the negative side of the coil as it the ignition amplifier switches. The ECU then turns on the fuel pump and energises the fuel relay that provides a fixed 12 volt supply to all the injectors. The transistors in the ECU starts to ground the injectors with a longer pulse than the normal idle pulse for about 3 seconds. This provides enough fuel to start the engine, combined with the stepper motor still being in its wide open position. Once the engine has fired, the air flow meter then takes over feeding the air flow volume back signal to the ECU and the injector pulse width is reduced to match the fuelling requirements for the engine at tick over. The stepper motor is also wound in to stabilise the idle at around 800 RPM. This system accounts for the short burst of higher RPM at tick over as the stepper goes from wide open to part closed during the start process.
One side effect of this system is if air leak develops any where in the inlet system, the engine will start and run for 3-4 seconds and then die. The initial over rich mixture will allow the engine to run, but once the air flow volume comes into play, (Now reduced because of the air leak) the injector pulse width is reduced to the point where the is insufficient fuel to keep the engine running, so it dies. The whole pipe work and breather system around the plenum chamber is pretty finely balanced and can be easily go out of tolerance should an air leak develop.